![]()
 全國服務熱線021-64162222
全國服務熱線021-64162222




 企業動態
企業動態 閥門首頁 > 新聞資訊 > 企業動態 >
閥門首頁 > 新聞資訊 > 企業動態 >
閥門定位器結構與工作原理
[ 2013-06-17 ]
閥門定位器有氣動和電動兩大類,是氣動執行器的主要附件,它與氣動調節閥配套使用。閥門定位器接受調節器輸出信號,然后將調節器的翰出信號成比例地輸出到執行機構。當閥桿移動以后,其位移童又通過機械裝置負反饋作用于閥門定位器,因此它與執行機構組成一個閉環系統。
閥門定位器能夠增加執行機構的愉出功率,減少控制信號的傳遞滯后,加快閥桿的移動速度。提高信號與閥位間的線性度,克服閥桿的摩擦力,消除不平衡力的影響,從而保證調節閥的正確定位,改善了調節閥的性能。目前使用電動調節器居多,這里介紹電一氣閥門定位器。
閥門定位器結構與工作原理
采用電一氣閥門定位器后,可用電動調節器輸出的0-10mA或4-2OmA DC電流信號去操縱氣動執行機構。一臺電一氣閥門定位器具有電一氣轉換器和氣動閥門定位器的雙重作用。
圖9-18是配氣動薄膜執行機構的電-氣閥門定位器的動作原理圖和實物圖。
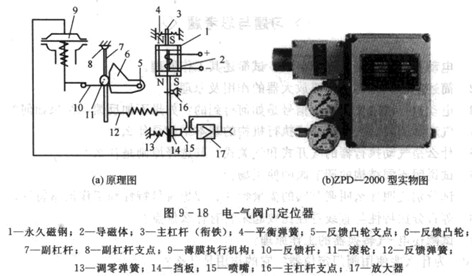
由永久磁鋼1、導磁體2、線圈、銜鐵(即主杠桿3)和工作氣隙構成了力矩馬達組件,它是將電流變為力(力矩)的轉換元件。導磁體和銜鐵用高導磁性能的坡莫合金制成。永久磁鋼呈U形,其端部N、S兩極罩在導磁體上。當信號電流通過線圈時,由于電磁場和永久磁鋼的相互作用,使主杠桿3受到一個向左的力,于是它繞支點16偏轉,使擋板14靠近噴嘴15,噴嘴背壓經放大器17放大后,送人薄膜執行機構9使閥桿向下移動,并帶動反饋桿10繞支點5轉動。連在同一軸上的反饋凸輪6也作逆時針方向轉動,通過滾輪11使副杠桿7繞支點8轉動,將反饋彈簧12拉伸。彈贊12對主杠桿的拉力與力矩馬達作用在主杠桿上的力兩者力矩平衡時,儀表便達到平衡狀態。此時,一定的信號電流就被轉換為一定的氣壓信號,并與閥門位置成精確的對應關系。彈簧13是作調整零位用的。改變凸輪6的形狀,可以改變輸人電流信號與輸出閥桿位移的對應關系。
閥門定位器能夠增加執行機構的愉出功率,減少控制信號的傳遞滯后,加快閥桿的移動速度。提高信號與閥位間的線性度,克服閥桿的摩擦力,消除不平衡力的影響,從而保證調節閥的正確定位,改善了調節閥的性能。目前使用電動調節器居多,這里介紹電一氣閥門定位器。
閥門定位器結構與工作原理
采用電一氣閥門定位器后,可用電動調節器輸出的0-10mA或4-2OmA DC電流信號去操縱氣動執行機構。一臺電一氣閥門定位器具有電一氣轉換器和氣動閥門定位器的雙重作用。
圖9-18是配氣動薄膜執行機構的電-氣閥門定位器的動作原理圖和實物圖。
由永久磁鋼1、導磁體2、線圈、銜鐵(即主杠桿3)和工作氣隙構成了力矩馬達組件,它是將電流變為力(力矩)的轉換元件。導磁體和銜鐵用高導磁性能的坡莫合金制成。永久磁鋼呈U形,其端部N、S兩極罩在導磁體上。當信號電流通過線圈時,由于電磁場和永久磁鋼的相互作用,使主杠桿3受到一個向左的力,于是它繞支點16偏轉,使擋板14靠近噴嘴15,噴嘴背壓經放大器17放大后,送人薄膜執行機構9使閥桿向下移動,并帶動反饋桿10繞支點5轉動。連在同一軸上的反饋凸輪6也作逆時針方向轉動,通過滾輪11使副杠桿7繞支點8轉動,將反饋彈簧12拉伸。彈贊12對主杠桿的拉力與力矩馬達作用在主杠桿上的力兩者力矩平衡時,儀表便達到平衡狀態。此時,一定的信號電流就被轉換為一定的氣壓信號,并與閥門位置成精確的對應關系。彈簧13是作調整零位用的。改變凸輪6的形狀,可以改變輸人電流信號與輸出閥桿位移的對應關系。
本文標題:閥門定位器結構與工作原理
本文地址:http://www.13476.cn/company-news/158.html
上一篇:電動閥門常見故障及解決方法 / 下一篇:閥門銷售怎樣解決客戶和供應商初次合作互不信任的問題
 閥門資訊
閥門資訊 天津電動球閥廠家現貨,批發優惠
天津電動球閥廠家現貨,批發優惠









 滬公網安備 31011402005796號
滬公網安備 31011402005796號
 走進湖泉
走進湖泉